柑橘是全球重要的经济作物之一,亦是我国南方地区种植面积最广、经济地位最高的农作物,柑橘相关产业已成为增加生产区农民收入和助力脱贫攻坚的重要支柱。目前,我国柑橘采摘机械作业水平低于2%,而综合机械化水平仅为5.75%。因此实现非结构化果园环境下的柑橘快速精准识别,确保机器人的高效、精准采摘作业,对提升果园农业装备的智能化水平,促进柑橘相关产业的可持续性发展具有极其重要的意义。
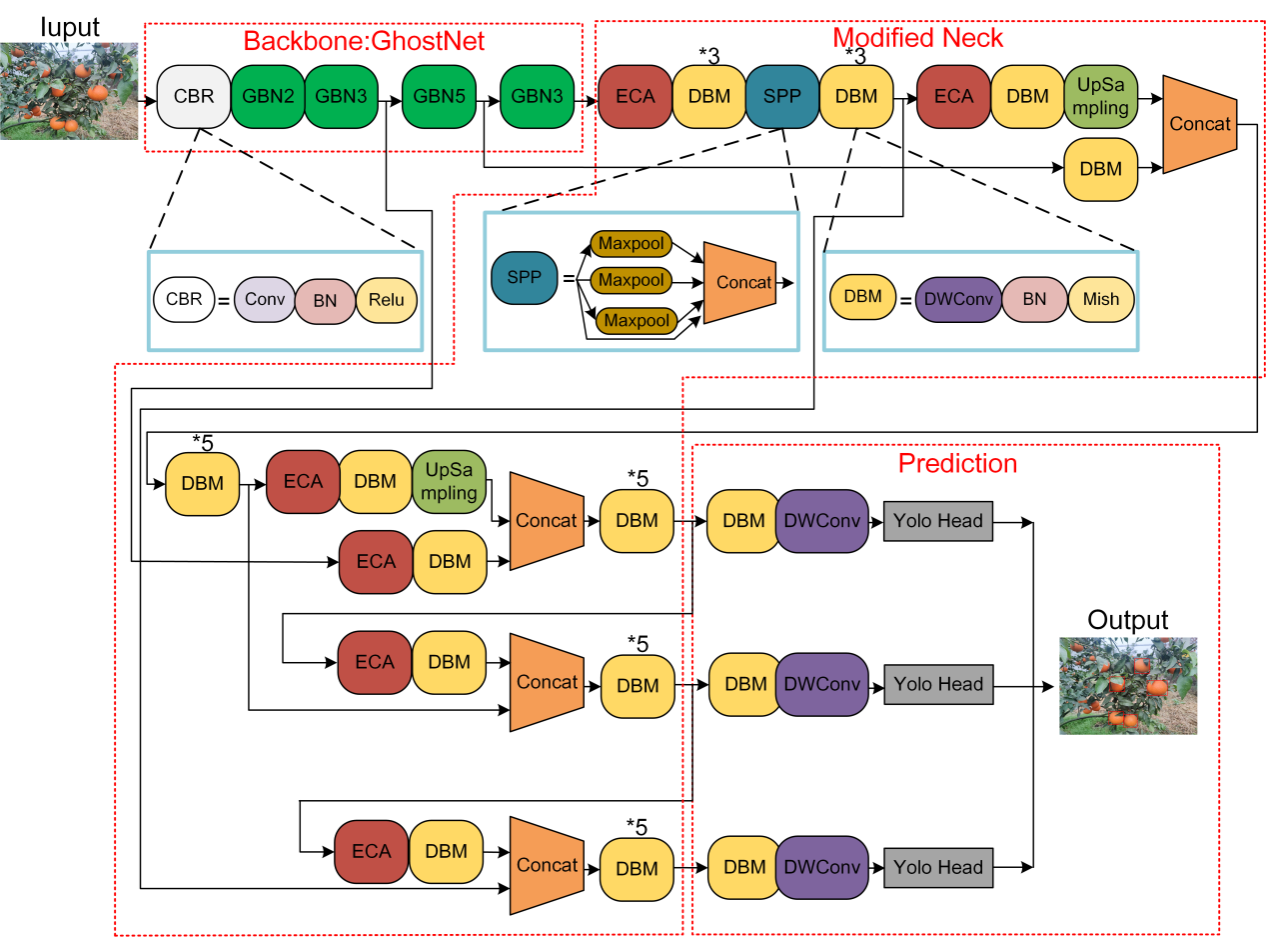
2023年2月,bst2255全球奢华游戏许丽佳教授团队最新的研究成果“Real-time and accurate detection of citrus in complex scenes based on HPL-YOLOv4”发表在国际农林科学著名学术刊物《Computers and Electronics in Agriculture》(中科院一区TOP期刊,IF=6.757),为实现采摘机器人目标精准识别提供了新思路。如何优化卷积神经网络的结构和学习机制以提高运算效率和识别准确率、面对非结构化果园环境如何增加其抗干扰能力等问题是该领域的研究重点与难点。该研究针对柑橘的快速检测与实时定位要求,深入研究YOLOv4网络的特征提取、卷积运算和注意力机制对计算效率和鲁棒性的作用机制,提出了HPL-YOLOv4识别模型。实现了在遮挡重叠、光照变化、模糊等复杂场景下的柑橘果实实时精准识别。
团队负责人许丽佳教授为本文第一作者,硕士研究生王乙涵和博士研究生石小仕为共同第一作者,学院赵永鹏副教授为通讯作者。该研究得到四川省科技厅重点研发项目、四川省自然科学基金面上项目及四川省科技厅创新创业苗子工程重点项目的支持。
此外,近期团队还在国际知名期刊Frontiers Plant Science(IF=6.627,中科院2区TOP)上发表了题为“Design of an efficient combined multipoint picking scheme for tea buds”的研究成果,该研究提出了一种针对茶叶嫩芽的多点组合采摘方案,并对采摘器末端的尺寸进行了选择性设计,本研究提出的方案可以为后续智能摘芽机器人的设计提供关键技术支持。
上述系列成果标志着学院围绕“农业工程”一级学科建设取得新的突破,对于进一步激发学院活力、提振师生信心、实现学科高质量发展奠定了坚实基础。
论文链接:https://doi.org/10.1016/j.compag.2022.107590、https://10.3389/fpls.2022.1042035
(文/赵永鹏、王乙涵、陈彦君 审/许丽佳)






